|
Yisheng He is a forth year Ph.D. student at the Hong Kong University of Science and Technology (HKUST), advised by Prof. Qifeng Chen, Prof. Long Quan, and Dr. Jian Sun. He also collaborates with Dr. Haibin Huang and Haoqiang Fan. Email / Google Scholar / GitHub / WeChat |

|
{kind=link}
|
I'm interested in 3D computer vision, RGBD representation learning (sensor fusion), robotics, few-shot learning and self-supervised learning. Downstream applications includes autonomous driving, AR/VR, robotic manipulation, etc. |
|
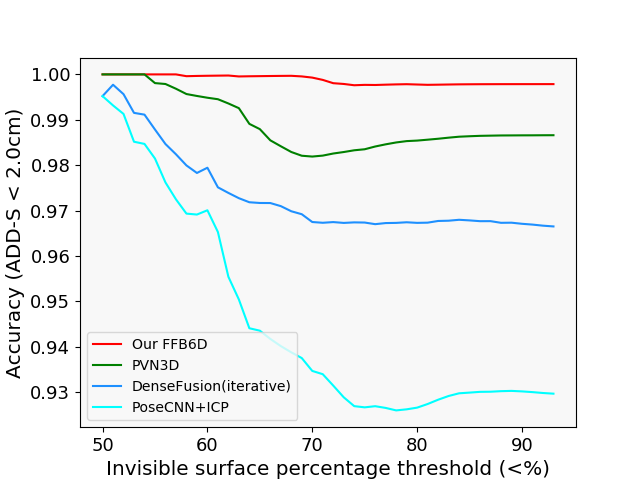
Yisheng He, Haibin Huang, Haoqiang Fan, Qifeng Chen, Jian Sun We extend FFB6D to deal with multi instances of the same class and improve keypoint detection on symmetric objects. |
|
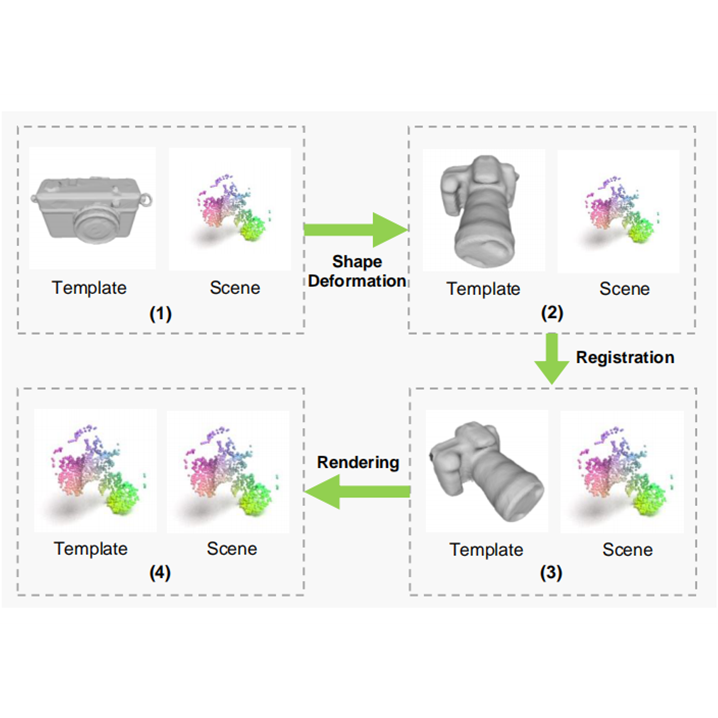
Yisheng He, Haoqiang Fan, Haibin Huang, Qifeng Chen, Jian Sun In submision, 2022 project page / arXiv A self-supervised framework for category-level object pose and size estimation via differentiable shape deformation, registration, and rendering. |
|
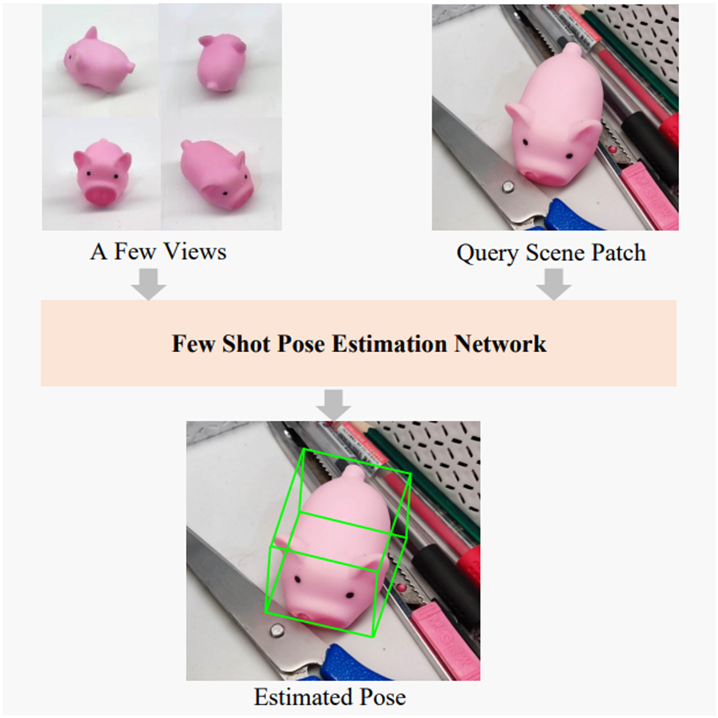
Yisheng He, Yao Wang, Haoqiang Fan, Jian Sun, Qifeng Chen CVPR, 2022 project page / arXiv / data / code 
A new open-set few-shot 6D object pose estimation problem: estimating the 6D pose of an unknown object by a few support views without CAD models and extra training. A large-scale synthesis dataset for pre-training and benchmarks for future research. |
|
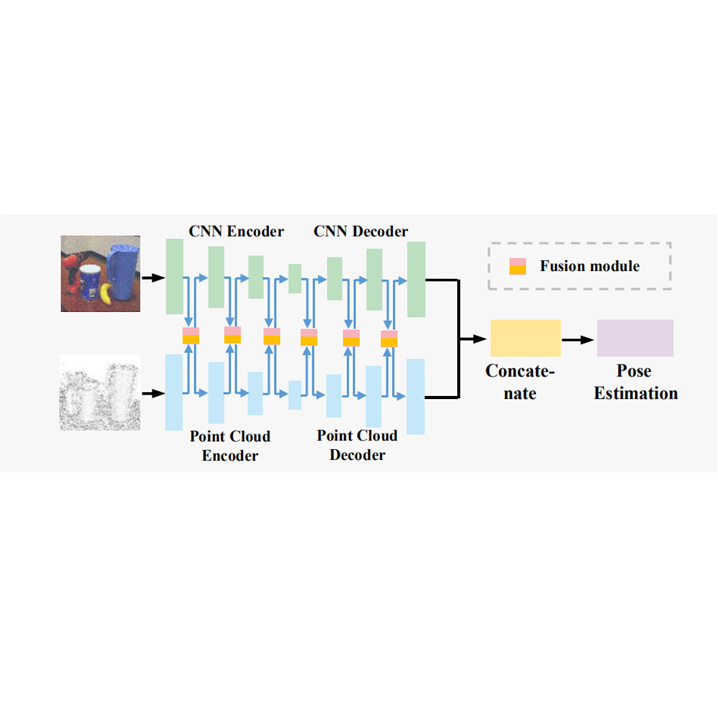
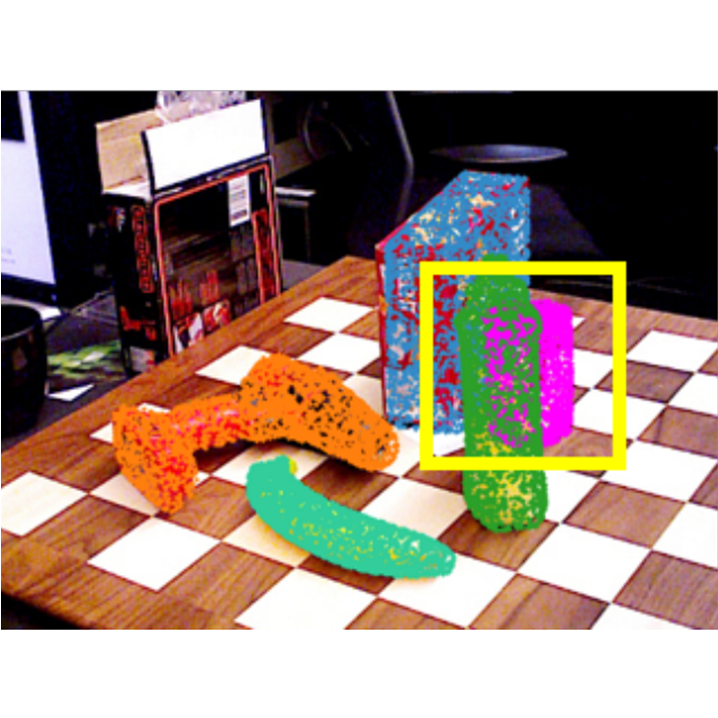
Yisheng He, Haibin Huang, Haoqiang Fan, Qifeng Chen, Jian Sun CVPR, 2021 (Oral Presentation) project page / arXiv / code  /
video (youtube) /
video (bilibili) /
video (youtube) /
video (bilibili)
A generic full flow bidirectional fusion framework for RGBD representation learning, applied to joint instance semantic segmentation and 3D keypoint-based 6D pose estimation. |
|
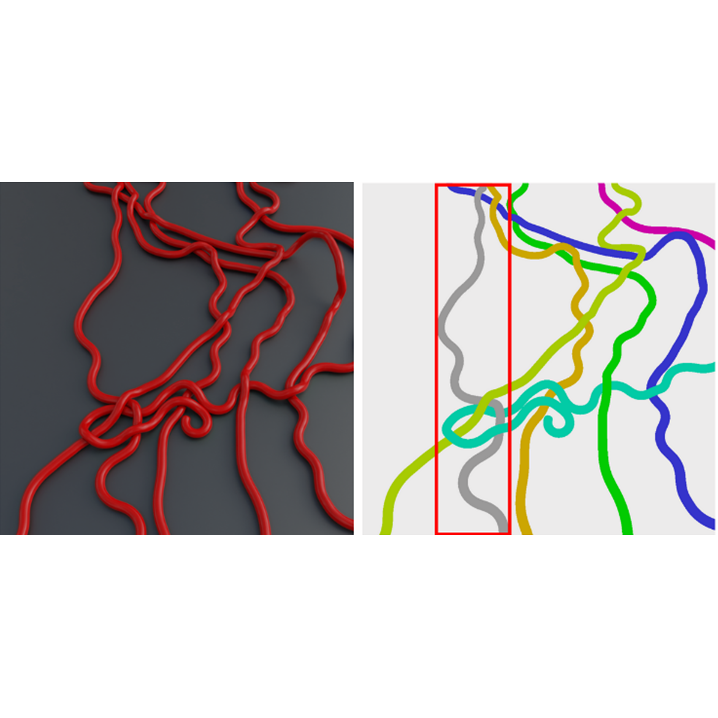
Lei Yang, Ziwei Yan, Yisheng He, Wei Sun, Zhenhang Huang, Haibin Huang, Haoqiang Fan arXiv, 2021 project page / arXiv / code / dataset A brand new dataset to promote the study of instance segmentation for objects with irregular shapes and an affinity-based algorithm to tackle it. |
|
Yisheng He, Wei Sun, Haibin Huang, Jianran Liu, Haoqiang Fan, Jian Sun CVPR, 2020 project page / arXiv / code  /
video (youtube) /
video (bilibili) /
video (youtube) /
video (bilibili)
The first deep learning 3D keypoint-based 6D pose estimation algorithm and an overall framework for joint instance semantic segmantation and 3D keypoint detection. |
|
I've also worked on technology that transfers to industrial products while at Megvii Research and Microsoft. |

|
We developed the world's first 3D face recognition algorithm for Android smartphones. It's shipped with OPPO Find X announced on June 2018. I developed liveness detection algorithms based on depth and infrared (IR) images in the project. The project team won the annual Meg-Team award, 2018. |

|
We developed a set of office suites based on Microsoft Office 365 and WeChat. The product was announced on November, 2017. |
|
|
|
|
Supervisor: Dr. Jian Sun; Collaborators: Dr. Haibin Huang, Haoqiang Fan Mentors: Dr. Yuzhi Wang, Haoqiang Fan |
|
|
Mentors: Raymond Xue, Hao Lin |
|
|

|
|
|
|
|
|
|
Last updated: March, 2022. Thanks Dr. Jon Barron for sharing the template code. |